🔍 Exploring the Dataset
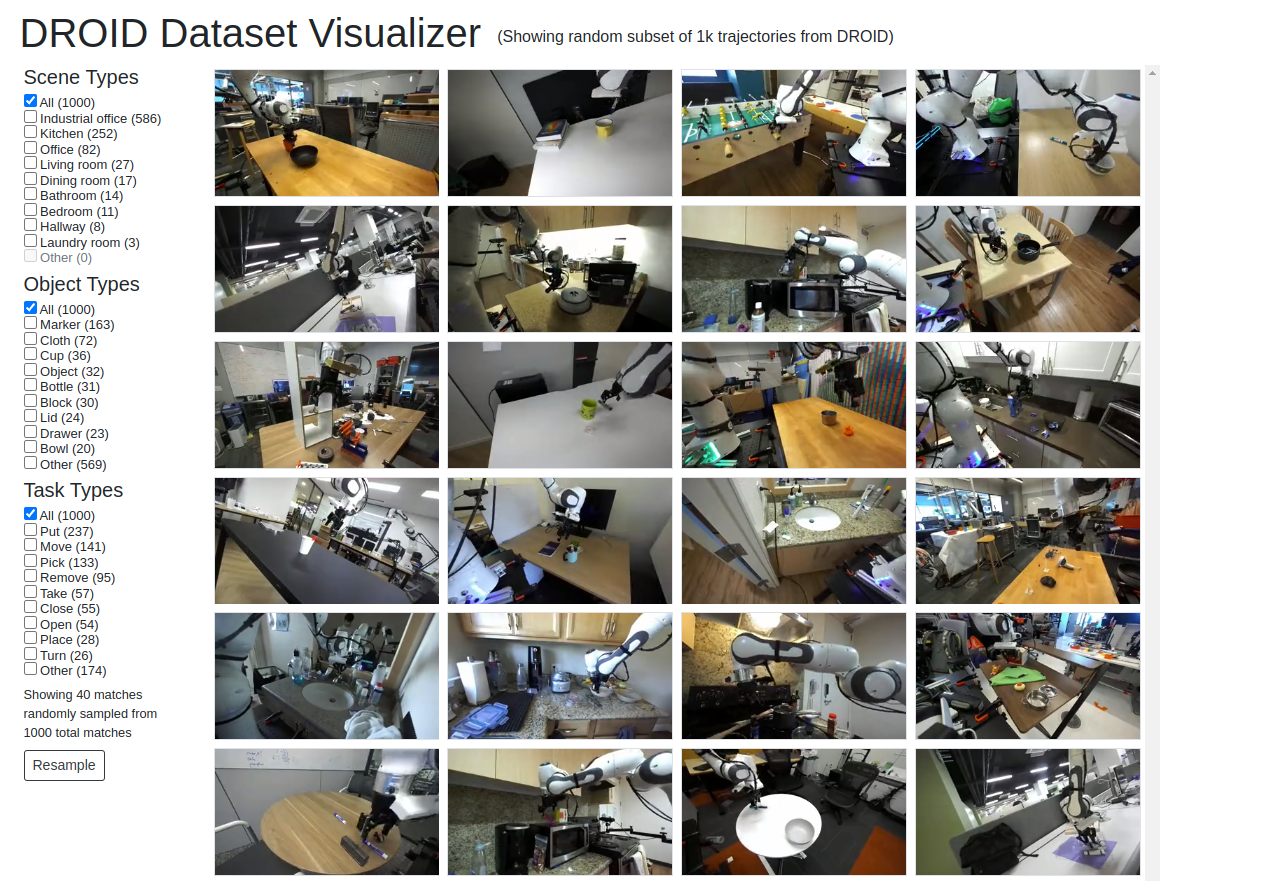
It is possible to interactively explore the DROID via the following interactive dataset visualizer. This is a great way to start understanding the DROID dataset and is a highly recommended starting point.
Additionally, we provide a Dataset Colab that demonstrates how to load and visualize samples from our dataset.
📈 Using the Dataset
The DROID dataset is hosted within a Google Cloud Bucket and is offered in two formats:
- RLDS: ideal for dataloading for the purpose of training policies
- Raw Data: ideal for those who wish to manipulate the raw data, use high-resolution images or stereo/depth information.
The DROID dataset is hosted on a Google cloud bucket. To download it, install the gsutil package. We provide three different versions of the dataset for download:
# Full DROID dataset in RLDS (1.7TB)
gsutil -m cp -r gs://gresearch/robotics/droid <path_to_your_target_dir>
# Example 100 episodes from the DROID dataset in RLDS for debugging (2GB)
gsutil -m cp -r gs://gresearch/robotics/droid_100 <path_to_your_target_dir>
# Raw DROID dataset in stereo HD, stored as MP4 videos (8.7TB)
gsutil -m cp -r gs://gresearch/robotics/droid_raw <path_to_your_target_dir>
# Raw DROID dataset, non-stereo HD video only (5.6TB, excluding stereo video & raw SVO cam files)
gsutil -m rsync -r -x ".*SVO.*|.*stereo.*\.mp4$" "gs://gresearch/robotics/droid_raw" <path_to_your_target_dir>
Accessing RLDS Dataset
We provide a Dataset Colab that walks you through the process of loading and visualizing a few samples from the DROID dataset.
We also provide an example of a “training-ready” data loader that allows for efficient loading of DROID data for policy training (in PyTorch and JAX), including parallelized loading, normalization and augmentation in our policy learning repo.
📝 Dataset Schema
The following fields are contained in every RLDS episode:
DROID = {
"episode_metadata": {
"recording_folderpath": tf.Text, # path to the folder of recordings
"file_path": tf.Text, # path to the original data file
},
"steps": {
"is_first": tf.Scalar(dtype=bool), # true on first step of the episode
"is_last": tf.Scalar(dtype=bool), # true on last step of the episode
"is_terminal": tf.Scalar(dtype=bool), # true on last step of the episode if it is a terminal step, True for demos
"language_instruction": tf.Text, # language instruction
"language_instruction_2": tf.Text, # alternative language instruction
"language_instruction_3": tf.Text, # alternative language instruction
"observation": {
"gripper_position": tf.Tensor(1, dtype=float64), # gripper position state
"cartesian_position": tf.Tensor(6, dtype=float64), # robot Cartesian state
"joint_position": tf.Tensor(7, dtype=float64), # joint position state
"wrist_image_left": tf.Image(180, 320, 3, dtype=uint8), # wrist camera RGB left viewpoint
"exterior_image_1_left": tf.Image(180, 320, 3, dtype=uint8), # exterior camera 1 left viewpoint
"exterior_image_2_left": tf.Image(180, 320, 3, dtype=uint8), # exterior camera 2 left viewpoint
},
"action_dict": {
"gripper_position": tf.Tensor(1, dtype=float64), # commanded gripper position
"gripper_velocity": tf.Tensor(1, dtype=float64), # commanded gripper velocity
"cartesian_position": tf.Tensor(6, dtype=float64), # commanded Cartesian position
"cartesian_velocity": tf.Tensor(6, dtype=float64), # commanded Cartesian velocity
"joint_position": tf.Tensor(7, dtype=float64), # commanded joint position
"joint_velocity": tf.Tensor(7, dtype=float64), # commanded joint velocity
},
"discount": tf.Scalar(dtype=float32), # discount if provided, default to 1
"reward": tf.Scalar(dtype=float32), # reward if provided, 1 on final step for demos
"action": tf.Tensor(7, dtype=float64), # robot action, consists of [6x joint velocities, 1x gripper position]
},
}
Accessing Raw Data
You can download the raw DROID data using the gsutil command listed above. It contains full-HD stereo videos for all three cameras, alongside with all other information contained in the RLDS dataset. Concretely, each episode folder contains the following information:
episode:
|
|---- metadata_*.json: Episode metadata like building ID, data collector ID etc.
|---- trajectory.h5: All low-dimensional information like action and proprioception trajectories.
|---- recordings:
|
|---- MP4:
| |
| |---- *.mp4: High-res video of single (left) camera view.
| |---- *-stereo.mp4: High-res video of concatenated stereo camera views.
|
|---- SVO:
|
|---- *.svo: Raw ZED SVO file with encoded camera recording information (contains some additional metadata)
Note: We realized that we missed 20% of episodes when face-blurring & copying the raw DROID data to the release bucket and are working on uploading the remainder of the dataset. This only affects the raw version of DROID, the RLDS version is complete. This should be fixed within a few days – please reach out to pertsch@berkeley.edu if you have any concerns in the meantime!
📄 Data Analysis and Further Information
Please consult the paper for detailed data analysis and further information about the dataset.